|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENSIKLOPEDIA ELEKTRONIK RADIO DAN KEJURUTERAAN ELEKTRIK Pancing elektronik. Ensiklopedia elektronik radio dan kejuruteraan elektrik
Ensiklopedia elektronik radio dan kejuruteraan elektrik / Rumah, rumah tangga, hobi Malah percubaan yang paling pemalu untuk memindahkan ke peralatan elektronik beberapa fungsi yang seseorang biasa anggap sebagai "milik mereka sendiri", dan, dengan itu, tidak boleh diganti, membangkitkan sikap berhati-hati terhadap diri mereka sendiri. Akhir sekali, ini terpakai kepada memancing amatur - salah satu bentuk hobi manusia yang paling konservatif. Walaupun sukar untuk membayangkan aktiviti yang lebih menarik untuk pereka amatur radio. Bermula dari rumusan masalah yang timbul di sini, dari "algoritma intuisi" untuk menguji yang dicipta. Dan bukan di ruang maya, di mana kita telah dipanggil dengan segera sejak kebelakangan ini, tetapi pada masa kini: di bawah langit biru, di antara hutan dan padang rumput, dengan percikan air dan ikan tanpa kod bar.
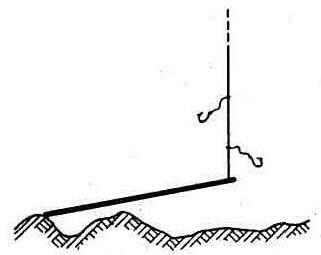
Gambar rajah kinematik peranti yang direka untuk mengait automatik ikan dalam keadaan memancing yang sukar ditunjukkan dalam Rajah.1. Di sini: 1 - perumahan, yang menempatkan keseluruhan "pemadat" elektronik-mekanikal mesin; 2 - spring rata, penggerak utama mesin; b - rocker pegas dengan klip 7 tali pancing 11, membentuk dengan pendakap 4, dipasang pada plat penebat 3, sepasang kenalan; 8 - tujahan dengan anting-anting cangkuk 9; 10 - aci kotak gear dengan benang MZ di hujungnya; 12 - pengapit untuk mengikat mesin di atas kapal atau di atas buritan bot. Dalam keadaan cock, mesin dipegang oleh gandingan aci 10 kotak gear dengan anting-anting 9. Enjin yang dihidupkan dapat serta-merta, dalam beberapa pusingan rotor, memutuskan sambungan gandingan ini. Tetapi pada ketika ini akan berlaku - elektronik mesin akan memutuskan. Algoritma kerjanya adalah mudah. Isyarat elektrik pertama penderia, yang berlaku pada masa rocker 6 menyentuh kurungan 4, menukar mesin kepada keadaan aktif: kira detik bermula dan pengiraan sentuhan ini, yang masih tidak jelas asalnya. Jika jumlah bilangan mereka - kedua-dua gangguan dan gigitan - dalam keadaan aktif automaton ini (tempohnya ditetapkan) tidak mencapai nombor tertentu N (juga ditetapkan), maka automaton sekali lagi mengambil keadaan awal - keadaan menunggu. Jika nombor ini dicapai, maka motor elektrik dihidupkan dan - cangkuk. Algoritma ini dilaksanakan oleh "pemadat" elektronik mesin, gambarajah skematiknya ditunjukkan dalam rajah. 2. Di sini: SF1 - pasangan kenalan "rocker-bracket" - sensor sistem; SF2 - pasangan kenalan "aci pengurang-anting" (pengurang dan motor elektrik diletakkan pada penebat asas); SA1 - suis togol, sesentuh SA1.2 yang mana, apabila dibuka, menyahtenagakan bahagian kuasa mesin apabila ia dipasang, umpan ditukar, dsb.; SA2 - suis yang menetapkan bilangan "gigitan" - N О{l,2,3,4}; SA3 - suis untuk tempoh selang masa aktif (dalam saat) - T О{2, 4, 8}.
Elemen DD1.1, DD1.2, C2, R4 membentuk penggetar tunggal yang menghapuskan kiraan palsu dalam DD3 - dalam kaunter "gigitan" - daripada "lantunan" kenalan sensor SF1. Pada elemen DD2.2, DD2.3, penjana nadi jam dipasang, mengikuti pada frekuensi 1 Hz. Kaunter DD4, merumuskan denyutan ini, menetapkan masa keadaan aktif mesin. Menetapkan semula pembilang, mengembalikan mesin ke keadaan asalnya - keadaan menunggu - dilakukan dengan denyutan amplitud "tunggal", yang dijana oleh unsur DD2.1 dan DD1.3. Ini berlaku sama ada pada penghujung masa aktif (apabila voltan tahap tinggi muncul pada enjin suis SA3), atau pada permulaan pemotongan (apabila sesentuh SF2 putus), atau apabila mesin dimatikan secara manual dengan suis togol SA1 - menutup pasangan sesentuh SA1.1. Pada elemen DD2.4, DD1.4 dan transistor VT3, VT4, penjana nada terkawal (dengan input 2 elemen DD2.4) dipasang, yang, dengan mengujakan kepala dinamik HA1, memberi isyarat kepada pemancing tentang peralihan mesin kepada keadaan aktif. Transistor VT1 dan VT2 ialah kunci elektronik untuk mengawal motor elektrik M1. Induktor L1 dalam penapis LC dililit pada litar magnet anulus (diameter luar - 10 ... 12 mm) diperbuat daripada ferit dengan m=1000...2000. Belitannya mengandungi 50...100 lilitan wayar PEV-2 0.2...0.3. Spring kuasa rata (2 dalam Rajah 1) - penggerak utama mesin - diperbuat daripada jalur gangsa fosforus setebal 0,8 mm. Lebarnya ialah 78 dan panjangnya (tanpa hujung terbenam) ialah 220 mm. Daya awal yang dicipta oleh spring semasa pemotongan ialah 1,3 kg, "maks" - sehingga 750 mm. Simpul 7 - terminal biasa dengan lubang untuk melepasi tali pancing. Dimensi pendakap kenalan tidak kritikal, hanya penting bahawa jurang yang diperlukan boleh ditetapkan antara pad sentuhannya dan hujung lengan goyang yang bergerak di antara mereka: minimum - 1, maksimum - 10 mm. Kedudukan rocker berhubung dengan kenalan pendakap boleh diubah dengan menegangkan atau melonggarkan spring dalam nod 5. Kekuatan mekanikal keseluruhan semua elemen ini mestilah cukup tinggi, kerana ia "memegang" ikan. Walau apa pun, mereka mesti menanggung 10 ... 15 kilogram jerks dan pukulan tanpa akibat. Paksi skru tempat ayunan rocker mesti memberikan rintangan yang minimum. Peranti pencetus mesin dan penempatan bahagiannya dalam bekas yang dilekatkan dari lembaran kaca organik yang cukup tebal (8 ... 10 mm) atau polistirena berimpak tinggi dalam bentuk kotak dengan penutup tampalan ditunjukkan dalam rajah. 3, a. Motor elektrik 1 - sebarang kuasa rendah bersaiz kecil, contohnya, dari mainan elektrik, mempunyai gear kecil 7 pada paksi dengan diameter 5 ... 6 dan panjang sekurang-kurangnya 5 mm (gear besar 4 harus bergerak bebas di sepanjangnya, buka skru dari anting-anting). Sebelum memasang motor elektrik, adalah perlu untuk memeriksa kualiti penebat penggulungan rotornya - rintangan kebocoran mestilah sekurang-kurangnya 1 MΩ. Gear gear besar yang sesuai yang menyediakan empat hingga lima kali perlahan boleh didapati dalam mainan yang sama. Butiran lain pencetus: 6 - aci kotak gear (keluli); Sokongan dalaman ke-2 (ia dilekatkan pada "bawah" badan); 3- spring rata lembut pada aci, menolaknya keluar; 5 - galas gangsa atau loyang ditekan ke dalam dinding perumahan. Subang gandingan aci gear dengan ketegangan spring boleh dibuat mengikut varian yang ditunjukkan dalam rajah. 3b. Dalam kes ini, lubang dengan diameter kira-kira 25 mm harus dibuat di penutup perumahan (tempatnya dalam Rajah 1 ditandakan dengan anak panah A), yang melaluinya, dengan memutar gear besar kotak gear dengan jari, hujung batangnya diskrukan ke dalam anting-anting. Ini adalah halangan dengan kebolehpercayaan yang sangat tinggi, ia tidak tertakluk kepada hampir sebarang pengaruh luar. Mengikut pilihan lain (Rajah 3, c), anting-anting, benang yang hanya dipelihara di bahagian bawah lubang elipsnya, hanya dibuang ke hujung aci kotak gear yang menonjol dari perumah.
Undercutting bermula dengan kemunculan "1" - voltan yang hampir dengan voltan bekalan - pada enjin suis SA2. Voltan ini menyekat input pengiraan pembilang DD3 (mengikut CP; isyarat dari sensor SF1 tidak lagi boleh mengubah keadaannya) dan, membuka kunci elektronik, dibuat pada transistor VT1, VT2, menghidupkan motor elektrik M1. Untuk 8 ... 10 pusingan pemutarnya, pemasangan "pautan tujah aci gear" ditanggalkan dan spring kuasa, meluruskan secara mendadak, menyerang. Tetapi sudah pada saat pemotongan nod ini (pasangan kenalan SF2) pada input 12 elemen DD2.1 terdapat voltan "tunggal", yang membawa kepada penampilan "1" dan pada input R kaunter DD3. Akibatnya, kaunter kembali ke keadaan asalnya, "sifar", "2" dipulihkan pada enjin suis SA0 (voltan hampir dengan potensi bas sifar), transistor VT1, VT2 rapat dan motor elektrik, setelah membuat hanya revolusi yang diperlukan, dimatikan. Pemuatan semula mesin dilakukan dengan suis togol SA1 dimatikan: pasangan sesentuh SA1.1nya, terpintas dalam kedudukan ini, "memegang" elektronik mesin dalam keadaan prapelancaran. Kelewatan automaton, i.e. masa antara kemunculan isyarat 1 pada enjin suis SA2 dan cangkuk sebenar bergantung pada kelajuan dan kuasa motor elektrik (ia boleh dipaksa dengan kuat), nyahpecutan kotak gear, bilangan benang aci yang dimasukkan ke dalam anting-anting , pelinciran bahagian berputar dan, sudah tentu, keadaan sumber kuasa. Dalam salinan yang dihasilkan, ia tidak melebihi 0,2 s. Kepekaan sensor SF1 ialah 10 g / mm (daya - pada tali pancing, pergerakan - pada pendakap sesentuh). Ia bergantung kepada kelembutan mata air rocker. Sumber kuasa mesin yang dilengkapi dengan motor elektrik 4 volt (daripada mainan yang tidak dipasang) boleh menjadi bateri empat sel galvanik atau bateri yang mampu menghantar arus 0,5 ... 1 A semasa pelepasan jangka pendek (beberapa persepuluh saat).pemakanan mungkin lebih tinggi. Tetapi, sudah tentu, tidak lebih tinggi daripada maksimum yang dibenarkan untuk litar mikro mesin. Mesin elektronik yang dijelaskan telah diuji untuk masa yang lama di stesen eksperimen marin Institut Biologi Marin Cawangan Timur Jauh Akademi Sains Rusia (kawasan perairan pulau Popov, Reinike, Rikord, dll. ). Memancing dilakukan terutamanya untuk ikan bawah pada kedalaman sehingga 20...25 meter. Dan walaupun keanehan memancing di laut - pitching, anjakan bot di bawah angin, dasar yang tidak rata, halangan lain - menetapkan tugas yang agak sukar untuk mesin, ia secara praktikalnya tidak kalah dengan nelayan berpengalaman dalam apa-apa. Dan dia sering menunjukkan keunggulannya ... Mesingan itu juga dibezakan dengan kemas, hampir tidak pernah merosakkan tisu penting. Ini ternyata satu kejutan yang menyenangkan, kerana ikan itu juga ditangkap untuk dipindahkan ke dalam akuarium.
Angka itu menunjukkan peralatan biasa mesin, hampir dengan yang diterima pakai dalam Primorye: tali pancing utama 0,7 ... 1 mm, rantai - 0,5 ... 0,6 mm 3 ... panjang 5 cm, cangkuk tunggal No. 10. . .12. Tetapi sinker berbeza: rod keluli dengan diameter 6 ... 8 dan panjang 250 mm atau lebih. Penenggelam dan kedudukan sedemikian di bahagian bawah membolehkan anda mengekalkan ketegangan tali pancing hampir tidak berubah walaupun dengan keseronokan yang ketara. Tetapi ini adalah tambahan kepada "pemikiran" elektronik mesin itu sendiri. Menangkap ikan "pada separuh air" tidak menjadi masalah baginya sama sekali. Sensitiviti sebenar mesin boleh dinilai dengan berat minimum spesimen yang ditangkap - 50 ... 100 g Berat maksimum ikan hanya dihadkan oleh kekuatan petunjuk. Penerbitan: cxem.net
Cara Baharu untuk Mengawal dan Memanipulasi Isyarat Optik
05.05.2024 Papan kekunci Seneca Prime
05.05.2024 Balai cerap astronomi tertinggi di dunia dibuka
04.05.2024
▪ Filem halimunan untuk menghantar mesej rahsia ▪ Saiz tandatangan dan narsisisme ▪ Mendengar kicauan burung boleh mengurangkan kebimbangan dan kemurungan ▪ Pendawaian meningkatkan liputan Wi-Fi 802.11b/g/n
▪ bahagian tapak Dokumentasi normatif mengenai perlindungan buruh. Pemilihan artikel ▪ artikel oleh Ronald Wilson Reagan. Kata-kata mutiara yang terkenal ▪ artikel Di negara manakah penyertaan dalam pilihan raya adalah wajib? Jawapan terperinci ▪ artikel Jurutera Proses Kanan. Deskripsi kerja ▪ artikel Alat kawalan pam air. Ensiklopedia elektronik radio dan kejuruteraan elektrik
Laman utama | Perpustakaan | artikel | Peta Laman | Ulasan laman web
www.diagram.com.ua |




 Tinggalkan komen anda pada artikel ini:
Tinggalkan komen anda pada artikel ini: