|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENSIKLOPEDIA ELEKTRONIK RADIO DAN KEJURUTERAAN ELEKTRIK Komputer perjalanan untuk basikal elektrik. Ensiklopedia elektronik radio dan kejuruteraan elektrik
Ensiklopedia elektronik radio dan kejuruteraan elektrik / Rumah, rumah tangga, hobi Kami membentangkan kepada pembaca kami komputer perjalanan berdasarkan mikropengawal PIC16F876A dengan penderia arus luaran, direka untuk basikal elektrik. Pada paparannya ia memaparkan kedua-dua parameter pemanduan dan voltan bateri, arus, kuasa dan penggunaan tenaga yang digunakan daripadanya. Peranti dibuat pada asas elemen yang boleh diakses dan mudah untuk direplikasi. Untuk memantau mod pengendalian basikal elektrik, pelbagai alat pengukur digunakan. Parameter elektrik diukur oleh penganalisis kuasa [1, 2], parameter gerakan dipantau oleh pelbagai komputer berbasikal elektronik [3] dan juga meter kelajuan mekanikal [4]. Malah terdapat paparan khas untuk basikal elektrik [5], menunjukkan semua parameter yang diperlukan, tetapi mempunyai kos yang tinggi. Berdasarkan ini, saya membangunkan komputer perjalanan untuk basikal elektrik pada mikropengawal PIC16F876A dengan sensor arus luaran. Spesifikasi Utama
Resolusi paparan parameter yang sepadan ditunjukkan dalam kurungan. Komputer perjalanan memaparkan masa semasa dalam kenaikan 1 minit. Gambar rajah komputer perjalanan ditunjukkan dalam Rajah. 1. Pengawal mikro DD2 (PIC16F876A-I/P) beroperasi daripada pengayun yang distabilkan oleh resonator kuarza ZQ2 dengan frekuensi 8 MHz. Penyambung XP1 disediakan untuk pengaturcaraan mikropengawal. Saya menyambungkan pengaturcara PICkit2 kepadanya. Program mikropengawal dibangunkan dalam persekitaran grafik Flowcode [6].
Pengukuran voltan dan arus dibuat menggunakan ADC 10-bit dalaman mikropengawal. Apabila mengukur voltan, isyarat daripada pembahagi voltan R5R9R12 dihantar ke input analog AN0 (RA0) mikropengawal. Apabila mengukur arus, penurunan voltan merentasi sensor arus Rш menguatkan penguat kendalian OPA241 (DA1). Daripada output op-amp, isyarat yang dikuatkan datang ke input analog AN1 (RA1) mikropengawal. Keuntungan ditetapkan dengan memotong perintang R13 dalam litar maklum balas Op-amp. Daripada OPA241, hampir mana-mana op-amp rel-ke-rel tunggal dalam pakej SO-8 boleh digunakan, contohnya, OPA340 atau TS507. Program ini mengira kuasa dan penggunaan elektrik berdasarkan nilai arus dan voltan yang diukur. Pisau penyukat piawai 75SHISV.2-0.5-15 dengan penurunan voltan 75 mV pada arus 15 A telah digunakan sebagai penderia arus jauh. Sebagai pengganti, anda boleh menggunakan mana-mana susut piawai dengan rintangan 5... 10 mOhm atau buatan sendiri yang serupa [7]. Komputer perjalanan dikuasakan oleh pengatur voltan linear yang dibentuk oleh transistor pengawal selia VT1 dan litar mikro TL431ID (DA2). Litar VD1R10C6C7 dipasang dalam litar kuasa, yang mengurangkan gangguan yang dihasilkan oleh motor elektrik yang sedang berjalan. Perintang R16 dan R17 memastikan pengagihan voltan seragam antara kapasitor C6 dan C7. Voltan masukan maksimum yang dibenarkan (voltan bateri) bergantung pada voltan pengumpul-pemancar yang dibenarkan bagi transistor VT1, pelesapan kuasa yang dibenarkan, kualiti pelesapan haba dan kuasa yang dikeluarkan pada perintang R19-R22. Dengan elemen penstabil yang ditunjukkan dalam rajah, voltan bateri tidak boleh melebihi 75 V. Walau bagaimanapun, peranti ini mampu memaparkan nilai sehingga 102,3 V pada penunjuk. Komputer perjalanan dibuat pada papan litar bercetak satu sisi yang diperbuat daripada gentian kaca setebal 1,5 mm. Lukisan konduktor papan litar bercetak dan susunan unsur di atasnya ditunjukkan dalam Rajah. 2 dan rajah. 3. Dalam Rajah. 4 menunjukkan rupanya.
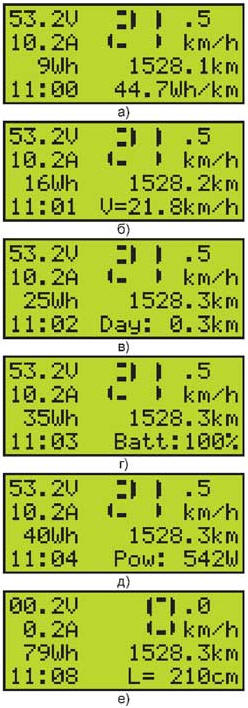
Di bahagian hadapan papan terdapat mikropengawal PIC16F876A, resonator kuarza ZQ2, cip jam masa nyata DS1307, perintang penalaan, transistor VT1, penyambung XP1 (blok pin sudut PLS-5R) dan blok PLS-14 untuk menyambungkan penunjuk HG1. Bahagian mengawan penyambung, blok soket PBS-1, dipateri ke dalam lubang pelekap penunjuk HG14. Bateri litium 1V G2032 CR3 dipasang dalam pemegang BH-642. Semua elemen lain dipasang pada sisi konduktor bercetak. Resonator kuarza silinder ZQ1 (32768 Hz) dipateri ke dalam lubang di sisi konduktor bercetak di sebelah pin 1 dan 2 litar mikro DD1. Bahagian atas badannya dipateri pada bahagian kerajang yang disambungkan kepada wayar biasa. Papan komputer trip disambungkan pada papan LCD pada dua dudukan logam setinggi 10...12 mm menggunakan skru M3. Perintang dan kapasitor saiz standard 120b untuk pemasangan permukaan digunakan. Kapasitor C6 dan C7 adalah tantalum oksida untuk pemasangan permukaan dalam saiz bingkai E. Ia boleh digantikan dengan kapasitor lain yang sama saiz dengan kapasiti 6,8...22 μF untuk voltan 35 V. Baki kapasitor adalah saiz seramik 1206 atau 0805. Transistor n-p-n BD139 dalam penstabil voltan boleh digantikan oleh transistor lain dengan struktur yang sama dalam pakej TO-126 dengan voltan pemancar pengumpul yang dibenarkan melebihi 80 V, contohnya, BD179, MJE182 2N5192, BF469, KT817G. Jalur kuprum nipis atau kepingan aluminium dengan keluasan kira-kira 6 cm diletakkan di bawah perumahan transistor.2, berfungsi sebagai sink haba. Transistor diikat pada papan dengan skru dan nat M3. Untuk mengurangkan ralat pengukuran, shunt Rш, hendaklah terletak sedekat mungkin dengan terminal negatif bateri. Semua sambungan ke komputer perjalanan boleh dibuat dengan wayar keratan rentas kecil. Untuk menyambung suis buluh SF1 (sensor laluan), shunt R ke komputer perjalananш, dan bateri GB1, penyambung PC7TV yang tidak ditunjukkan dalam rajah digunakan, dipasang pada sarung komputer perjalanan. Suis buluh diambil dari komputer basikal elektronik yang gagal. Parameter dalam komputer perjalanan dipaparkan pada empat baris LCD WH1604A dengan voltan bekalan 5 V tanpa lampu latar. Ketiadaannya dijelaskan oleh arus tinggi yang digunakan oleh lampu latar (220 mA), yang akan menyebabkan terlalu panas transistor VT1. Tujuh parameter dipaparkan serentak pada LCD: voltan, arus, jumlah elektrik yang digunakan, masa semasa, kelajuan, jumlah perbatuan dan penggunaan tenaga elektrik tertentu dari saat komputer perjalanan dihidupkan (lihat Rajah 4). Nilai kelajuan dipaparkan pada skrin menggunakan pseudografik. Ini memungkinkan untuk membawa ketinggian digit kepada dua baris, yang menjadikannya lebih mudah untuk membaca kelajuan dari skrin. Komputer perjalanan dikawal menggunakan butang SB1 “M” (tetapkan minit), SB2 “H” (tetapkan jam) dan SB3 “P” (mod paparan). Dengan menekan butang SB3 berturut-turut di sudut kanan bawah skrin, bukannya penggunaan tenaga elektrik tertentu (Rajah 5,a), kelajuan purata (Rajah 5,b), perbatuan harian (Rajah 5,c). ), cas bateri (Rajah 5,d) atau kuasa yang digunakan oleh motor elektrik (Rajah 5,d).
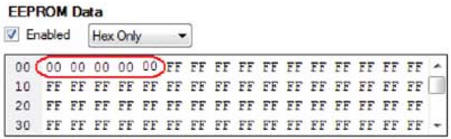
Apabila anda menahan butang SB3 ditekan lebih daripada 5 s, program memasuki mod untuk menetapkan lilitan roda (Rajah 5, e). Dengan terus menahan butang ini, lilitan roda berubah dalam langkah 1 cm antara 201 hingga 215 cm (roda 26 inci). Apabila peranti dihidupkan pada mulanya, lilitan roda ditetapkan kepada 210 cm. 5 saat selepas melepaskan butang SB3, mod tetapan lilitan roda dikeluarkan dan nilai yang ditetapkan ditulis pada EEPROM mikropengawal. Apabila pengaturcaraan mikropengawal, adalah perlu untuk menulis sifar kepada lima sel EEPROM pertama (Rajah 6) untuk menetapkan nilai awal jarak yang dilalui kepada sifar. Jika ini tidak dilakukan, perbatuan akan menjadi 1525,7 km.
Program ini menjimatkan jarak perjalanan dalam EEPROM mikropengawal 3 saat selepas basikal elektrik berhenti. Untuk menunjukkan detik rakaman, simbol asterisk muncul di penjuru kanan sebelah atas LCD selama 0,3 s. Apabila kuasa dimatikan, program menetapkan semula nilai penggunaan tenaga elektrik tertentu, kelajuan purata dan perbatuan harian. Untuk menyediakan peranti, bukannya bateri, anda boleh menggunakan sumber kuasa makmal dengan voltan keluaran 25...50 V dan arus beban yang dibenarkan sekurang-kurangnya 5 A. Sebagai beban yang setara, anda boleh menggunakan kuasa yang kuat. perintang wirewound dengan rintangan 5...10 Ohms. Sediakan peranti dalam susunan berikut. Pertama, tentukur voltmeternya. Untuk melakukan ini, voltan dibekalkan kepada peranti dari bateri atau dari sumber kuasa makmal, memantaunya dengan voltmeter digital yang tepat. Dengan menukar rintangan perintang penalaan R9, bacaan yang sama dicapai antara voltmeter standard dan peranti yang dilaraskan. Meter semasa kemudiannya ditentukur. Ammeter digital yang tepat disambung secara bersiri dengan beban. Dengan menggunakan voltan bekalan, menukar rintangan perintang penalaan R13, bacaan yang sama dicapai antara ammeter standard dan peranti yang dilaraskan. Jika perlu, memilih perintang R25 menetapkan kontras optimum imej pada penunjuk. Komputer perjalanan boleh dipasang dalam mana-mana bekas plastik atau logam yang sesuai. Fail papan litar komputer perjalanan dalam format Sprint Layout 5.0 dan program mikropengawal: ftp://ftp.radio.ru/pub/2016/05/tripcomp.zip. Kesusasteraan
Pengarang: A. Nefediev
Cara Baharu untuk Mengawal dan Memanipulasi Isyarat Optik
05.05.2024 Papan kekunci Seneca Prime
05.05.2024 Balai cerap astronomi tertinggi di dunia dibuka
04.05.2024
▪ Pemantauan rangkaian korporat masa nyata ▪ Daya ultra-rendah diukur dengan satu atom ▪ Memori denyar 19nm generasi kedua Toshiba
▪ bahagian tapak Penerangan kerja. Pemilihan artikel ▪ Artikel silang dan harga. Seni audio ▪ artikel Pemanasan elektrik konkrit dan tanah. Arahan standard mengenai perlindungan buruh ▪ artikel awalan RF kepada osiloskop. Ensiklopedia elektronik radio dan kejuruteraan elektrik
Laman utama | Perpustakaan | artikel | Peta Laman | Ulasan laman web
www.diagram.com.ua |




 Tinggalkan komen anda pada artikel ini:
Tinggalkan komen anda pada artikel ini: