|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENSIKLOPEDIA ELEKTRONIK RADIO DAN KEJURUTERAAN ELEKTRIK Berbilang program pemasa-jam-termometer. Ensiklopedia elektronik radio dan kejuruteraan elektrik
Ensiklopedia elektronik radio dan kejuruteraan elektrik / Pengawal selia kuasa, termometer, penstabil haba Artikel itu menerangkan peranti digital sejagat berdasarkan pengawal PIC yang boleh melaksanakan fungsi pemasa berbilang program yang boleh mengawal empat beban, jam, jam penggera, termometer jarak lebar dan pengawal suhu yang menyediakan kedua-dua pemanasan dan penyejukan objek terkawal. Peranti digital sejagat, litarnya ditunjukkan dalam Rajah. 1, mempunyai spesifikasi berikut:
Kawal peranti menggunakan pad kekunci 16 butang. Ia adalah mungkin untuk menghidupkan dan mematikan bunyi butang menekan, menetapkan bekalan bunyi, cahaya dan isyarat kawalan, kemungkinan pelarasan individu peranti untuk aplikasi tertentu dengan menukar program kawalan MK. Terdapat bekalan kuasa sandaran daripada bateri boleh dicas semula terbina dalam. Semua parameter yang ditetapkan semasa bekerja dengan peranti disimpan walaupun apabila kuasa sandaran dimatikan selama lebih daripada 40 tahun. Seperti yang dapat dilihat dari rajah, asas peranti adalah pengawal PIC DD1. Daftar Shift DD2 dan penyahkod DD3 direka bentuk untuk mengatur petunjuk dinamik, yang prinsipnya adalah seperti berikut. Pertama, kod 3 digunakan pada penyahkod DD1111, akibatnya tahap log ditetapkan pada semua outputnya. 1 dan tiada satu pun daripada digit penunjuk HG1 menyala. Seterusnya, kod aksara yang diperlukan dimasukkan ke dalam daftar DD2, selepas itu kod yang sepadan dengan bit penunjuk yang dikehendaki dihantar ke DD3. Pada masa yang sama dengan mengemas kini data untuk penunjuk, papan kekunci diimbas, 16 butang daripadanya dibahagikan kepada dua kumpulan - lapan dalam setiap satu. Kesimpulan umum butang kumpulan ini disambungkan kepada dua input MK (RB0 dan RB1). Apabila butang ditekan, isyarat log dihantar ke salah satu input ini. 0 daripada output penyahkod DD3 yang sepadan, dengan itu menentukan kodnya. Menggunakan papan kekunci, anda boleh memulakan / menghentikan mana-mana pemasa program atau semua pada masa yang sama, tetapkan mod operasi termostat, masa semasa, masa penggera, dsb. Kebanyakan butang mempunyai dua tujuan, bergantung pada maklumat yang digunakan oleh pengguna. masuk dari papan kekunci: berangka atau kawalan . Pertimbangkan tujuan butang papan kekunci dengan lebih terperinci. "0", "Jam" - digit 0 apabila memasukkan maklumat berangka atau bertukar kepada mod jam, di mana anda boleh menukar masa semasa, tetapkan masa untuk penggera dihidupkan, hidupkan mod penggera jam baharu, edit masa pekali pembetulan (lihat di bawah). "1" - "9" - nombor 1 - 9 apabila memasukkan maklumat berangka atau memilih pemasa program yang sesuai. "Terma" - bertukar kepada mod termostat, di mana anda boleh menetapkan nilai suhu semasa, mengedit nilai suhu terkawal, jenis peraturan (pemanasan atau penyejukan) dan parameter termistor. "Del" - tanda "tolak" apabila memasukkan nilai suhu terkawal, menghidupkan / mematikan termostat, termometer, jam penggera atau jam (apabila dimatikan, tanda-tanda --- dipaparkan dan bukannya bacaan yang sepadan), sifar apabila memasukkan data berangka. "Tetapkan" - peralihan/keluar ke mod menukar nilai mana-mana parameter (pemasa perisian, masa semasa, jam penggera, termometer, termostat, tetapan). "Pilihan" - tukar kepada mod menukar tetapan. Di sini anda boleh menghidupkan / mematikan bunyi butang, mod selamat datang, pilih sumber untuk mengeluarkan isyarat kawalan, dsb. "Pilih" - mulakan/hentikan pemasa perisian semasa jika nilai kelewatan masanya berbeza daripada 0. "AH" - mulakan/hentikan semua pemasa perisian yang nilai tunda masanya berbeza daripada 0. Peranti ini mampu mengeluarkan empat isyarat kawalan, setiap satunya boleh digunakan mengikut budi bicara pengguna. Adalah mungkin untuk menetapkan sumber isyarat ini:
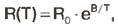
Peranti menggunakan HL1 LED dua warna, yang berkelip merah jika sekurang-kurangnya satu isyarat kawalan telah menjadi aktif apabila satu atau lebih pemasa dimulakan, dan hijau jika tiada isyarat aktif. Pada penghujung kelewatan masa mana-mana pemasa berjalan, penunjuk HG1 mula berkelip, dan pemancar piezo HA1 dengan pengganggu terbina dalam berbunyi bip. Ini berterusan sehingga pengguna menekan mana-mana butang pada papan kekunci atau masa berlalu, nilai yang disimpan dalam ingatan MK dan boleh diubah semasa pengaturcaraannya. Isyarat bunyi yang dikeluarkan apabila pemasa dicetuskan ditentukan oleh dua parameter: tempoh bunyi dan bilangan pek bunyi. Apabila penggera berbunyi, isyarat bunyi juga diberikan, tetapi hanya dua simbol paling kiri penunjuk - A dan L (dari bahasa Inggeris. ALARM - jam penggera) mula berkelip. Isyarat bunyi jam penggera juga diterangkan oleh dua parameter yang disimpan dalam ingatan MK. Bergantung pada resonator kuarza yang digunakan, ketepatan jam ternyata berbeza, oleh itu, pembetulan masa perisian dilaksanakan dalam peranti ini. Faktor pembetulan ditetapkan oleh pengguna dari papan kekunci dan juga disimpan dalam ingatan MK. Malah, ia mewakili bilangan mikrosaat yang ditambahkan pada tempoh ayunan yang dijana oleh pemasa dalaman MK - dalam kes kami 1,92 ms. Dengan bantuan faktor pembetulan, masa ini dicapai menjadi sama dengan 2 ms (tempoh masa 1 s direkodkan selepas setiap 500 tempoh tersebut). Suhu diukur dengan mengukur penurunan voltan merentasi termistor RK1. Rintangannya sebagai fungsi suhu ditentukan oleh formula berikut:
di mana R0 ialah pemalar yang mempunyai dimensi rintangan; B ialah pemalar yang mempunyai dimensi suhu; T ialah suhu mutlak. Oleh itu, pergantungan ini mesti dikurangkan kepada satu linear. Terdapat kaedah linearisasi yang diketahui menggunakan jambatan termistor, tetapi pendekatan ini menyusahkan kerana apabila menggantikan termistor, anda perlu menukar parameter jambatan itu sendiri, yang tidak begitu mudah. Adalah lebih mudah untuk mendapatkan nilai suhu tanpa sebarang linearisasi, tetapi untuk ini anda perlu mengira nilai ungkapan berikut:
di mana Rd ialah rintangan perintang tambahan; N - kod binari 10-bit diperoleh selepas penukaran analog-ke-digital; Nyah - bekalan voltan. Dalam peranti yang diterangkan, ungkapan ini dikira oleh program kawalan MK, dan hasilnya dipaparkan pada penunjuk. Perlu diingatkan bahawa julat suhu terukur dan terkawal di atas (-43 ... +470 ° C) boleh diregangkan, dimampatkan atau dialihkan dalam apa jua cara. Selang yang dinyatakan telah dipilih kerana ralat pengukuran suhu di dalamnya tidak melebihi ±2 °C. Dalam kes ini, rintangan perintang tambahan R17 ialah 300 ohm. Untuk mengurangkan ralat, ia boleh ditingkatkan, bagaimanapun, akibatnya, sempadan selang suhu akan berubah. Untuk memudahkan pengiraan, anda boleh menggunakan dokumen jangka (10 bit).mcd untuk sistem MathCAD 2001, yang mengira julat suhu yang diukur berdasarkan parameter yang ditentukan bagi termistor RK1, perintang R17 dan ralat yang diperlukan. Untuk memastikan jam masa nyata tidak tersasar apabila kuasa utama dimatikan, instrumen mempunyai unit kuasa sandaran MK. Ia terdiri daripada bateri 1 V GB3,6, perintang R16 dan diod VD2, VD3. Apabila kuasa utama dihidupkan, diod VD3 ditutup, dan bateri GB1 dicas melalui perintang R16. Apabila kuasa utama dimatikan, voltan bateri dibekalkan melalui diod VD3 hanya kepada MK (diod VD2 menghalang bekalan voltan kepada elemen yang tinggal pada peranti). MK menentukan fakta gangguan kuasa, kerana ia sentiasa memantau tahap voltan pada pin RB2. Dan apabila ia menjadi sama dengan log. 0, MK berhenti menjana semula penunjuk dan mengundi papan kekunci, menghentikan semua pemasa perisian berjalan, berhenti mengukur dan mengawal suhu dan beralih kepada mod jam. Di samping itu, jika tetapan ditukar semasa bekerja dengan peranti, maka selepas mematikan kuasa, LED merah akan berkelip seketika, jika tetapan tidak berubah - hijau. Jika peranti tidak sepatutnya digunakan untuk masa yang lama (seminggu atau lebih), maka untuk mengelakkan pelepasan lengkap bateri, anda boleh mematikan kuasa sandaran menggunakan jumper S1. MK sentiasa memantau status kenalan butang pada papan kekunci, dan jika tidak ada satu tekan dalam masa yang ditentukan, dan tidak satu pemasa program dilancarkan, ia secara automatik beralih ke mod jam. Program kawalan MK ditulis dalam C, jadi ia boleh menggunakan mana-mana jenis data dengan mudah, termasuk yang sebenar. Program ini dibangunkan dalam sistem pengaturcaraan HT-PIC C (ia boleh "dimuat turun" dari tapak ). Untuk nyahpepijat, kami menggunakan emulator dalam litar yang paling mudah, iaitu satu set kenalan yang menyambungkan garisan port selari komputer ke soket di bawah MK pada papan utama. Surat-menyurat kesimpulan port selari komputer dengan soket soket MK pada papan pemasa diberikan dalam Jadual. 1. Untuk mengawal emulator, program kawalan MK telah disusun dengan perubahan kecil dalam persekitaran pengaturcaraan Borland C++ 3.1.
Malangnya, kerja emulator sedemikian berlaku pada skala masa yang berbeza daripada yang sebenar, tetapi bagaimanapun, tanpa peranti sedemikian, hampir mustahil untuk menyahpepijat program yang kompleks itu. Tanpa penggunaan emulator, hanya penukaran analog-ke-digital telah dilaksanakan, penerangan yang berkaitan dengan MK ini boleh didapati di laman web (dokumen DS30292C - "Modul ADC 10-bit dalam mikropengawal PIC16F87x"). Mari kita pertimbangkan secara ringkas perkara utama program kawalan MC. Ia ditulis menggunakan metodologi pengaturcaraan berstruktur, akibatnya ia mempunyai sejumlah besar subrutin. Selepas menghidupkan kuasa, MK mengkonfigurasi port I / O, ADC dan pemasa dalaman. Kemudian gelung utama mula berjalan, yang tidak terhingga. Di dalamnya, seperti yang telah disebutkan, kehadiran voltan bekalan utama sentiasa diperiksa, dan jika ia dimatikan, MK berhenti melaksanakan semua fungsi kecuali untuk pemasaan. Apabila kuasa utama dihidupkan, ia memaparkan skrin percikan dan kembali ke mod pengendalian. Maklumat yang sepatutnya dipaparkan pada penunjuk pada saat semasa disimpan dalam tatasusunan d. Dalam proses penjanaan semula penunjuk, MC menulis semula kandungannya ke dalam tatasusunan perantaraan, dan daripadanya membaca secara berurutan kod aksara keluaran dan memaparkannya pada penunjuk. Tatasusunan tambahan diperkenalkan untuk menghapuskan kelipan penunjuk yang terhasil daripada menulis maklumat baharu kepada tatasusunan d sebelum yang lama belum dipaparkan sepenuhnya. Sebagai contoh, katakan tatasusunan d pada mulanya mengandungi rentetan "ABCDEFHLP", dan apabila aksara keempat ("D") dipaparkan, rentetan "FDA 2002" dimasukkan dalam tatasusunan. Kemudian pengguna peranti, disebabkan oleh inersia penglihatan manusia, pada satu ketika akan melihat baris "ABC 2002". Di samping itu, jika proses sedemikian diulang secara berterusan (dan ini akan berlaku dalam kerja sebenar), orang itu akan mendapat tanggapan bahawa maklumat pada penunjuk sedang berkelip. Seperti yang dinyatakan, papan kekunci diimbas serentak dengan kemas kini penunjuk. Apabila mana-mana butang ditekan, subrutin penindasan lantunan kenalan dipanggil, yang melambatkan beberapa milisaat (nilai masa ini disimpan dalam memori MK), semasa peranti tidak bertindak balas kepada penekanan butang selanjutnya. Perlu juga diperhatikan bahawa masa pendedahan pemasa perisian, jam dan penggera ditetapkan dalam beberapa saat (kaunter jam ditetapkan semula apabila nilai 24 x 60 x 60 = 86400 dicapai), dan sebelum dipaparkan pada penunjuk ia ditukar. kepada format H : MM : SS untuk pemasa atau kepada format HH : MM untuk jam dan penggera. Ini dilakukan menggunakan formula berikut:
C = mod masa 60. Di sini operasi ][ bermaksud membuang bahagian pecahan, iaitu pembahagian adalah integer. Nilai jam, minit dan saat yang diperolehi belum lagi sesuai untuk paparan langsung pada penunjuk, kerana ia dibentangkan dalam kod binari. Untuk memilih tempat perpuluhan yang paling ketara dan paling kurang ketara, perlu melakukan dua lagi operasi pada setiap nilai:
LSB = nilai mod 10. Pertimbangkan satu contoh. Biarkan perlu untuk memaparkan nilai 8673 s pada penunjuk dalam format H : MM : SS. Kita mendapatkan
C = 8673 mod 60 = 33. Oleh itu, penunjuk akan memaparkan 2: 24: 33 Daripada contoh yang diberikan, dapat dilihat berapa banyak operasi yang perlu dilakukan hanya untuk menyusun output kepada penunjuk. Hampir mustahil untuk melaksanakan matematik sedemikian dalam bahasa himpunan. Dalam bahasa C, ini dilaksanakan dalam beberapa baris sahaja, manakala, terima kasih kepada tahap pengoptimuman yang tinggi, kod program agak padat dan pantas. Tetapi perkara yang paling penting ialah pengaturcara boleh menumpukan perhatian utamanya pada algoritma program, mengabstraksi daripada ciri-ciri khusus seni bina mikropengawal yang digunakan. Semua ini menyumbang kepada pemindahan mudah program dari satu MK ke MK yang lain. Teks sumber program MK dan kod "perisian tegar" dalam format Intel HEX terletak di alamat di atas di Internet. Untuk memprogramkan MK, pengarang menggunakan pengaturcara yang dipasang mengikut skema yang ditunjukkan dalam Rajah. 2, dan perisian PonyProg2000, versi terkini yang boleh "dimuat turun" dari tapak web . Perbezaan utama antara pengaturcara dan yang diterangkan dalam [1] ialah penambahan satu lagi transistor (VT3) pada litar penjanaan isyarat penyegerakan, yang meningkatkan kebolehpercayaan pengaturcaraan dengan menghapuskan sepenuhnya voltan negatif pada pin MK.
Peranti yang diterangkan membenarkan pengaturcaraan MK pada papan, iaitu, ia menyokong teknologi ICSP (Pengaturcaraan Siri Dalam Litar - pengaturcaraan bersiri dalam litar). Untuk melakukan ini, ia disambungkan oleh lima wayar ke pengaturcara melalui penyambung X1 seperti berikut: 7 - biasa; 5,6 - 5 V; 2 - SDA; 3 - SCL; 1 - Upprog. Anda boleh menggunakan pengaturcara lain, termasuk yang menyokong pengaturcaraan voltan rendah. Dalam kes kedua, anda mesti menyambungkan kenalan pengaturcara yang sepadan dengan pin 4 penyambung X1. Lukisan papan litar bercetak peranti ditunjukkan dalam rajah. 3, papan kekunci - dalam rajah. empat.
Terdapat tujuh lubang pada papan pemasa, di mana, sebelum memasang bahagian, kepingan wayar tin dimasukkan dan dipateri ke konduktor bercetak di kedua-dua belah papan. Fungsi pelompat juga dilakukan oleh kesimpulan beberapa bahagian. Lubang-lubang di mana sambungan konduktor bercetak sedemikian dibuat diserlahkan dalam rajah. 3 dengan empat titik bersilang.
Fail sumber projek dan perpustakaan komponen terpakai untuk CAD Accel EDA 15.0 terletak di tapak di atas. Peranti menggunakan perintang tetap dan kapasitor untuk pemasangan permukaan. Pengecualian ialah kapasitor oksida C6, C7 (K50-35). MK PIC16F876 boleh mempunyai frekuensi operasi maksimum dan julat suhu, perkara utama ialah ia berada dalam pakej DIP (mempunyai akhiran SP). Pemancar piezoelektrik HRM14AX boleh digantikan dengan unit yang dibuat pada tiga elemen litar mikro KR1533LAZ dan pemancar piezoelektrik ZP-18 [2]. Termistor RK1 - MMT-4 dengan rintangan nominal 15 kOhm (R0 = 0,294 Ohm, V = 3176 K). Sebagai penyambung X1 - XZ, blok berpecah dengan pin lurus digunakan, yang digunakan dalam teknologi komputer: untuk X1, blok dengan susunan pin dua baris digunakan, dan untuk X2 dan XZ - dengan satu baris. Sesentuh kelapan palam XP1 dan palam XP2 ketiga telah dikeluarkan, dan palam dimasukkan ke dalam soket sepadan bahagian mengawan penyambung - kepingan tali pancing yang tebal. Langkah ini akan menghalang penyambung daripada mengawan secara tidak betul. Soket penyambung X2 diperbuat daripada panel 20-slot untuk litar mikro dalam pakej DIP (satu bahagian daripadanya digunakan, yang mempunyai 10 pin). Butang SB1-SB16 - TS-A3PS-130. Kandungan MK EEPROM, yang boleh diubah untuk menetapkan parameter operasi lain, dibentangkan dalam Jadual. 2.
Lajur "Parameter" mengandungi nama parameter, yang dipaparkan pada penunjuk. Jika terdapat tanda sempang dalam lajur ini, maka parameter ini hanya boleh diubah apabila memprogramkan MK. Kesusasteraan
Pengarang: D.Frolov, Ryazan
Kulit tiruan untuk emulasi sentuhan
15.04.2024 Petgugu Global kotoran kucing
15.04.2024 Daya tarikan lelaki penyayang
14.04.2024
▪ Menguji kereta pandu sendiri dengan pemandu jauh ▪ LED menukar sayur-sayuran menjadi tumbuhan ubatan ▪ Adakah meteorit menjejaskan iklim
▪ bahagian laman web Direktori elektronik. Pemilihan artikel ▪ artikel Siapa Yang Mencipta Lembaran Muzik? Jawapan terperinci ▪ artikel Krisis hipertensi. Penjagaan kesihatan ▪ artikel Bekalan kuasa, 1-29 volt 2 amp. Ensiklopedia elektronik radio dan kejuruteraan elektrik
Laman utama | Perpustakaan | artikel | Peta Laman | Ulasan laman web
www.diagram.com.ua |











 Tinggalkan komen anda pada artikel ini:
Tinggalkan komen anda pada artikel ini: