|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ALAT DAN MEKANISME UNTUK PERTANIAN
Motoblock dengan troli. Lukisan, penerangan
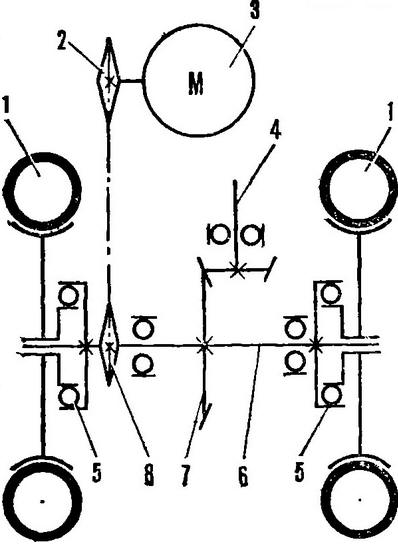
Buku Panduan / Alat dan mekanisme untuk pertanian Traktor berjalan kaki telah dibina oleh ahli bulatan "Juruteknik Muda" sekolah teknik vokasional No. 25 dari bandar Kelmentsi, wilayah Chernivtsi. Dengan bantuannya, plot kentang diproses, rumput dipotong, dan barang diangkut. Susun atur traktor berjalan kaki adalah tradisional: rangka, enjin dan casis beroda dua. Seperti yang diperlukan, ia disambungkan kepada: di hadapan, mesin pemotong yang didorong oleh aci berlepas kuasa; di belakang adalah bajak satu badan dengan roda sokongan; tiga lengan tajam penanam atau garu (melalui lampiran); troli kargo (melalui sambungan engsel). Seperti dalam kebanyakan mesin yang serupa, reka bentuk traktor dan troli berjalan di belakang menggunakan komponen dan pemasangan daripada skuter Vyatka dan Elektron. Ini ialah enjin VP-150M, roda, rangka, stereng, peralatan elektrik, tempat duduk. Roda diambil dari Penanam yang dinyahaktifkan, kotak gear serong untuk memacu aci penghantar, radas pemotong dan kekili adalah dari pengepala ZhVN-6, cengkaman terlampau adalah dari pembenih bijirin SZUG-3, 6, tangki bahan api adalah dari enjin pelancaran traktor YuMZ-6. Penghantaran traktor berjalan di belakang adalah mekanikal, rantai gear. Ia terdiri daripada dua sproket dengan 10 dan 44 gigi, rantai dengan pic 19,05 mm dan sepasang gear serong dengan nisbah gear 1,4 kepada aci lepas landas kuasa yang dibawa ke hadapan. Data teknikal traktor berjalan di belakang
Perbezaan dalam penghantaran telah ditinggalkan, kerana ini memerlukan pengenalan mekanisme penguncian roda, yang, pertama, merumitkan reka bentuk, dan kedua, menjadikannya sukar untuk bergerak pada plot kecil. Oleh itu, dua klac overrun digunakan, yang membolehkan roda pemacu tergelincir. Unit kuasa traktor berjalan di belakang ialah bingkai (Rajah 3). Asasnya adalah palang - sudut 75x40 mm, di mana empat lubang digerudi: dua Ø 14,2 dan dua Ø 12,2 mm. Dua bolt M12 dikimpal ke dalam yang terakhir dari bahagian dalam bingkai. Ia digunakan untuk menyambungkan lampiran peralatan pertanian dan unit artikulasi troli kargo.
Di sebelah kiri, rasuk sokongan dikimpal pada anggota silang - sudut 67x67 mm dengan potongan berukuran 166x39 mm di rak menegak untuk perumahan kotak gear. Di bahagian hadapan, rasuk berakhir dengan sokongan untuk kurungan bipod letak kereta. Di sebelah kanan, plat penyokong berukuran 200x38x8 mm dikimpal pada anggota silang, direka, seperti rasuk, untuk memasang kotak gear. Rangka sub-enjin (Rajah 5) ialah plat berukuran 280x40x8 mm, di bahagian tengahnya pengapit pelekap enjin yang diperbuat daripada paip 76X5 mm dikimpal. Di sini, lubang bujur dibuat untuk menegangkan rantai pemacu dengan menggerakkan keseluruhan rangka sub-motor berbanding rangka traktor berjalan di belakang.
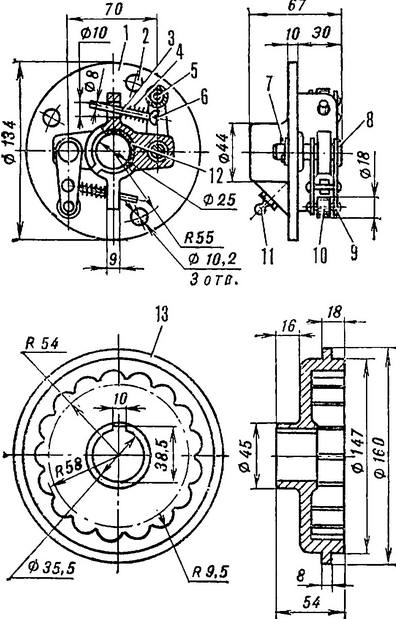
Di hadapan, rod menegak dikimpal pada plat - rod Ø 20 mm, dan padanya adalah pendakap pemasangan enjin hadapan - sudut 20x20 mm dengan lubang membujur di rak mendatar, yang berfungsi untuk menyesuaikan kedudukan enjin pada bingkai dan menghapuskan salah jajaran rantai. Potongan 20x6 mm dibuat dalam rak menegak sudut untuk memasang hentian sarung kabel klac. Tork dari aci keluaran dihantar ke rantai oleh gegancu pemacu; Ia diperbuat daripada hab - gegancu lama dari skuter Vyatka, yang giginya dikisar hingga Ø 34 mm - dan gegancu sepuluh gigi dengan lubang tengah Ø 30 mm. Mereka dikimpal bersama, seperti yang ditunjukkan dalam Rajah 4. Apabila dipasang, traktor berjalan di belakang adalah kecil. Untuk mengurangkan lagi dimensinya, muffler enjin skuter standard digantikan dengan yang buatan sendiri, lebih padat (Rajah 13) dan sama sekali tidak lebih rendah dari segi kualiti daripada kilang. Untuk pembuatannya, sebahagian daripada muffler Vyatka digunakan - paip dengan tali pinggang. Ia dimasukkan ke dalam kaca Ø 75 dan ketinggian 65 mm dan disambungkan ke cincin dengan mengimpal. Satu lubang digerudi dalam kaca untuk keluarnya gas ekzos. Muffler dipasang terus pada port ekzos silinder enjin. Enjin dihidupkan, seperti pada skuter, dengan kickstarter. Bahan api mengalir ke karburetor secara graviti. Peralihan gear dilakukan oleh tuil yang dikimpal pada sektor kotak gear. Walau bagaimanapun, kawalan utama traktor berjalan kaki - tuil gas dan klac - terletak pada pemegang kawalan lampiran dan stereng troli kargo. Jambatan traktor berjalan di belakang ditunjukkan dalam Rajah 6. Untuk memasang klac terlampau, aci kotak gear perlu dipanjangkan sebanyak 170 mm (di sebelah kiri sebanyak 100 mm dan di sebelah kanan sebanyak 70 mm). Untuk melakukan ini, lubang tengah Ø 8 dan 30 mm dalam digerudi di hujungnya dan benang M10 dipotong. Batang 130 dan 100 mm panjang telah diskrukan di sana, dikimpal pada aci, dimesin hingga Ø 25 mm, dan benang M20 sepanjang 40 mm dipotong di hujungnya. Lubang gerudi Ø 3,2 mm untuk pin cotter. Di hujung kiri aci, gegancu yang dipacu dengan 44 gigi dan bahagian utama klac overrun kiri dipasang pada kekunci biasa (untuk tujuan ini, tempat duduknya dimesin hingga Ø 35,5 mm dan alur kunci digiling). Alur yang sama dibuat di sebelah kanan aci. Bahagian pemacu gandingan tidak diubah, hanya tiga lubang yang digerudi di dalamnya untuk mengikat cakera roda dari penanam. Sudah tentu, jika dikehendaki, aci pemacu baharu boleh dibuat; ia ditunjukkan dalam Rajah 7. Klac terlampau (Rajah 8) berfungsi seperti berikut. Apabila aci berputar, bahagian pemacu, dengan selnya, bersandar pada penggelek yang dipacu dan memaksanya berputar. Apabila memusing traktor berjalan di belakang, roda, bergerak dalam bulatan jejari yang lebih besar, berputar lebih cepat daripada aci, dan bahagian pemacu klac, dengan itu, lebih cepat daripada bahagian yang didorong. Oleh itu, penggelek, memampatkan mata air, menggelongsor di atas permukaan jejaring (klik lembut kedengaran). Apabila kelajuan putaran roda berkurangan, penggelek terlibat semula dengan sel. Sesendal nilon ditekan ke dalam rongga dalaman bahagian terdorong setiap klac terlampau. Antara muka "sendal aci berjalan" dilincirkan dengan gris melalui minyak. Untuk lampiran (Rajah 9), unit penanam telah digunakan. Rod berkembar dipendekkan dan dikimpal pada saluran dok. Ia juga mempunyai lubang membujur untuk dipasang pada traktor berjalan di belakang.
Batang-batang berakhir dengan pemegang pendakap untuk peralatan pertanian dengan lubang untuk raknya dan skru pengunci. Paip pemegang kawalan dikimpal pada saluran di atas. Hujungnya diratakan, dan lubang digerudi di dalamnya untuk memasang stereng dengan tuil gas dan klac. Pemasangan engsel (Rajah 12) dibuat daripada aci stereng skuter. Aci dipendekkan kepada 460 mm, dan garpu sambungan universal automotif dikimpal ke bahagian bawah. Garpu tindak balas dikeluarkan, dan plat sepanjang 135 mm diletakkan pada hujung salib dan dikimpal padanya. Hujung bawah plat diserong dan dikimpal ke saluran. Yang terakhir ini juga mempunyai lubang membujur untuk memasang troli pada rangka traktor berjalan di belakang. Pemasangan engsel dilincirkan melalui minyak. Di tengah-tengah bingkai troli (Rajah 11) adalah bingkai skuter Vyatka atau Electron. Dari bawah, dua sudut 35x35 mm 870 mm panjang dikimpal kepadanya. Hujung bebas belakangnya disambungkan dengan sudut ketiga sepanjang 500 mm. Terdapat juga dua garpu dari suspensi hadapan Vyatka (hentian perumah dram brek roda dikimpal ke kanan), disambungkan antara satu sama lain dengan paip setengah inci mendatar. Subframe berbentuk U yang diperbuat daripada sudut 35x35 mm juga dikimpal padanya dan pada bingkai utama skuter. Untuk memasang badan, dua sesendal engsel dipasang pada paip mendatar. Mekanisme pengunci badan ringkas dipasang pada sudut melintang subframe: tuil pengunci, lubang mata, spring dan sesendal pemandu. Pada jarak 190 mm dari pemegang tuas pengunci, lubang Ø 2,5 mm telah digerudi dan pin cotter dimasukkan ke dalamnya di mana spring terletak. Dalam kedudukan kerja, pengapit dengan hujungnya memasuki gelung depan pengikat badan dan memegangnya. Rangka badan troli (Gamb. 10) diperbuat daripada sudut 20x20 mm dan disarung dengan kepingan keluli setebal 1,5 mm. Gelung untuk memasang badan dalam kedudukan pengangkutan dikimpal padanya di hadapan, dan di sisi terdapat gelung sambungan dengan sesendal engsel, di mana pin dimasukkan - rod keluli Ø 17 mm. Kesimpulannya, masih boleh dikatakan bahawa mengendalikan traktor berjalan kaki adalah mudah. Ahli kalangan kita, sebagai contoh, yang menguasai dalam satu pelajaran. Traktor berjalan kaki juga mudah untuk mengangkut barang. Pemandu duduk di tempat duduk yang dipendekkan diputar 180° (dengan kotak alat di bawah) dan mengawal traktor berjalan di belakang, memegang pemegang standard yang ditinggalkan pada stereng. Pengarang: V.Nikityuk
▪ Injap longkang automatik pam elektrik
Mesin untuk menipis bunga di taman
02.05.2024 Mikroskop Inframerah Lanjutan
02.05.2024 Perangkap udara untuk serangga
01.05.2024
▪ Pengeluaran pada teknologi TSMC 16FinFET Plus
▪ bahagian tapak Asas pertolongan cemas (OPMP). Pemilihan artikel ▪ artikel Model enjin pesawat. Petua untuk seorang pemodel ▪ artikel Mengapa Greece menghalang Macedonia daripada menyertai NATO dan EU? Jawapan terperinci ▪ Artikel Anamyrta cocculus. Legenda, penanaman, kaedah aplikasi ▪ artikel Amplifier pada lampu 6H13S. Ensiklopedia elektronik radio dan kejuruteraan elektrik
Laman utama | Perpustakaan | artikel | Peta Laman | Ulasan laman web
www.diagram.com.ua |













 Lihat artikel lain bahagian
Lihat artikel lain bahagian 